- Webcode搜索|係列
-
#代碼
- 關鍵字建議
菜單關閉

- inCAD圖書館回家
- >No.000291雜誌轉移機製
No.000291雜誌轉移機製
23
23
扶輪的手把雜誌的。



選擇標準
基於中風,準確性和推力。
可用的大小
■單軸機器人RSH1
| 高度 (毫米) |
類型 | 鉛 (毫米) |
中風 (50毫米遞增) |
|---|---|---|---|
| 65年 | RSH1 | 6 | 150 - 800 |
| 12 | |||
| 20. | |||
| RSH2 | 5 | 150 - 1050 | |
| 10 | |||
| 20. | |||
| 30. | |||
| RSH3 | 5 | 150 - 1050 | |
| 10 | |||
| 20. |
選擇步驟
■單軸機器人選擇步驟
負載能力
↓
中風
↓
周期時間和馬克斯。速度
↓
檢查細節
準確的信息。
單軸機器人精度
| 高度 (毫米) |
類型 | 鉛 (毫米) |
中風 (50毫米遞增) |
定位重複性 (毫米) |
|---|---|---|---|---|
| 65年 | RSH1 | 6 | 150 - 800 | ±0.02 |
| 12 | ||||
| 20. | ||||
| RSH2 | 5 | 150 - 1050 | ±0.01 | |
| 10 | ||||
| 20. | ||||
| 30. | ||||
| RSH3 | 5 | 150 - 1050 | ±0.01 | |
| 10 | ||||
| 20. |
性能信息。
■速度/負載(負載信息。)單軸機器人
| 類型 | 鉛 (毫米) |
Max。 負載 能力 (公斤) |
允許的時刻 (N・米) |
Max。速度(毫米/秒) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 水平 | 垂直 | 投手 | 偏航 | 滾動 | 150 - 第550位 |
600年 聖 |
650年 聖 |
700年 聖 |
750年 聖 |
800年 聖 |
||
| RSH1 | 6 | 40 | 8 | 95年 | 70年 | 110年 | 360年 | 324年 | 270年 | 234年 | 216年 | 180年 |
| 12 | 20. | 4 | 720年 | 648年 | 540年 | 468年 | 432年 | 360年 | ||||
| 20. | 12 | - - - - - - | 1200年 | 1080年 | 900年 | 780年 | 720年 | 600年 | ||||
| 類型 | 鉛 (毫米) |
Max。 負載 能力 (公斤) |
允許的時刻 (N・米) |
Max。速度(毫米/秒) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 水平 | 垂直 | 投手 | 偏航 | 滾動 | 150 - 第650位 |
700年 聖 |
750年 聖 |
800年 聖 |
850年 聖 |
900年 聖 |
950年 聖 |
1000年 聖 |
1050年 聖 |
||
| RSH2 | 5 | 50 | 16 | 95年 | 70年 | 110年 | 300年 | 255年 | 225年 | 195年 | 180年 | 165年 | 150年 | 135年 | 120年 |
| 10 | 40 | 8 | 600年 | 510年 | 450年 | 390年 | 360年 | 330年 | 300年 | 270年 | 240年 | ||||
| 20. | 20. | 4 | 1200年 | 1020年 | 900年 | 780年 | 720年 | 660年 | 600年 | 540年 | 480年 | ||||
| 30. | 7 | - - - - - - | 1800年 | 1530年 | 1350年 | 1170年 | 1080年 | 990年 | 900年 | 810年 | 720年 | ||||
| 類型 | 鉛 (毫米) |
Max。 負載 能力 (公斤) |
允許的時刻 (N・米) |
Max。速度(毫米/秒) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 水平 | 投手 | 偏航 | 滾動 | 150 - 第600位 |
650年 聖 |
700年 聖 |
750年 聖 |
800年 聖 |
850年 聖 |
900年 聖 |
950年 聖 |
1000年 聖 |
1050年 聖 |
|||
| RSH3 | 5 | 80年 | 163年 | 128年 | 143年 | 300年 | 255年 | 225年 | 195年 | 180年 | 165年 | 150年 | 135年 | 120年 | 105年 | |
| 10 | 60 | 600年 | 510年 | 450年 | 390年 | 360年 | 330年 | 300年 | 270年 | 240年 | 210年 | |||||
| 20. | 30. | 1200年 | 1020年 | 900年 | 780年 | 720年 | 660年 | 600年 | 540年 | 480年 | 420年 | |||||
技術計算
■技術計算單軸機器人
選擇單軸機器人的方法
//www.seojaguars.com/maker/misumi/mech/product/rs/


選擇標準
基於精度、中風和設計
可用的大小
■精密空心線性軸-直
| 材料 | 硬度 | 表麵處理 |
|---|---|---|
| 52100軸承鋼 | 感應淬火 52100軸承鋼:58 hrc或更多 440 c不鏽鋼:56 hrc或更多 |
- - - - - - |
| 440 c不鏽鋼 | ||
| 52100軸承鋼 | 鍍硬鉻: 鍍層硬度HV750 - 電鍍厚度5µm或更多 |
|
| 52100軸承鋼 | 低溫度。黑色鍍鉻 |
■大小和尺寸
| O.D. | 長度 在1毫米的增量 |
線程迪亞。 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 4 | 5 | 6 | 8 | 10 | 12 | 16 | 20. | 24 | 30. | Rc1/8 | Rc1/4 | Rc3/8 | ||
| 6 | 20 ~ 600 | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 8 | 20 ~ 800 | - - - - - - | ○ | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 10 | 20 ~ 800 | - - - - - - | - - - - - - | ○ | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 12 | 20 ~ 1000 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - |
| 13 | 25 ~ 1000 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - |
| 16 | 30 ~ 1200 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - |
| 20. | 30 ~ 1200 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ |
| 25 | 35 ~ 1200 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 30. | 35 ~ 1500 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 35 | 35 ~ 1500 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 40 | 50 ~ 1500 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | ○ | - - - - - - | - - - - - - | - - - - - - |
| 50 | 60 ~ 1500 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | ○ | - - - - - - | - - - - - - | - - - - - - |
準確的信息。
■軸的精度
| O.D. (毫米) |
O.D.公差(毫米) g6 |
|---|---|
| 6 | -0.004 -0.012 |
| 8 | -0.005 -0.014 |
| 10 | |
| 12 | -0.006 -0.017 |
| 13 | |
| 15 | |
| 16 | |
| 18 | |
| 20. | -0.007 -0.020 |
| 25 | |
| 30. | |
| 35 | -0.009 -0.025 |
| 40 | |
| 50 |


選擇標準
住房單位,同時支持線性和旋轉運動。
可用的大小
■無油襯套住房
| 住房 | 襯套 | |
|---|---|---|
| 材料 | 表麵處理 | 材料 |
| 鋁合金 | 清晰的陽極電鍍 | 聚縮醛樹脂 |
■大小和尺寸
| 身份證 | 安裝麵,軸上 維 |
寬度 | 高度 |
|---|---|---|---|
| 6 | 14 | 16 | 22 |
| 8 | 16 | 20. | 26 |
| 10 | 19 | 26 | 32 |
| 12 | 20. | 26 | 34 |
| 16 | 27 | 36 | 49 |
準確的信息。
■無油襯套的準確性
| 身份證(毫米) | 寬容 |
|---|---|
| 6 | + 0.095 + 0.045 |
| 8 | |
| 10 | |
| 12 | + 0.120 + 0.060 |
| 15 | |
| 16 |






 條款和條件使用CAD數據
條款和條件使用CAD數據-
你訪問的CAD數據三角集團公司(以下簡稱公司)的帖子在這個網站(包括3 d CAD數據,中間3 d CAD數據和二維CAD數據;以下簡稱數據)是由公司生產和/或銷售的產品(以下簡稱產品)假設您已經閱讀並接受這些條款和條件支配你的數據的使用。如果您不同意這些條款和條件,你必須停止使用本網站和數據。你不能使用任何非法目的的數據或以任何方式與這些條款和條件不一致。
- 1。CAD數據
- 數據準備協助該公司的用戶CAD設計過程通過提供尺寸和其他產品信息。為了提供最好的速度和穩定的工作在這個網站,產品圖紙被簡化,以減少數據的大小。例如,一些產品的顯示沒有油溝形狀、螺絲或彈簧的形狀。另外,請注意,寬容,表麵粗糙度和/或倒角的數據從實際產品可能會有所不同。
- 2。免責聲明的數據
- 盡管公司精心準備的數據,不能保證數據的準確性,方差如上所述。公司也可以修改,添加或刪除的數據在任何時間,恕不另行通知。公司不承擔任何責任的任何直接的、間接的、後果性或特殊的損害賠償,你可以要求造成使用的數據或數據的任何更改或刪除無關的原因。公司不提供保修的質量、精度、功能、安全或組合的產品和零部件的可靠性。示例應用程序和產品組合僅供演示之用。
- 3所示。版權
-
版權的內容和數據屬於公司或產品的製造商。說版權受版權法和國際條約保護。使用(包括複製、修改、上傳、發布、傳輸、分配、許可、銷售和出版)的數據,除了目的使用上述數據事先批準的情況下,公司是不允許的。數據不能用於任何目的(包括促銷)除了設計您的機器。如果你違反本規定或法律、法規,公司可能會禁止你使用的數據,該公司的網站和/或采取法律行動。隻要你遵守這些條款和條件,該公司授予您非排他性、不可轉讓的、可撤銷的許可來訪問和使用數據的唯一目的協助你設計機器,把產品。
發現的CAD數據被用於任何目的除了上麵提到的或對相關法律、三角可能采取法律行動,包括一個用於阻止涉及用戶使用CAD數據和訪問到三角站點。 - 4所示。擔保免責聲明
-
任何和所有的內容出現在本網站提供僅作參考之用。本網站,其內容和鏈接提供一個“是”和“可用”的基礎,隻有在使用你的唯一的風險,受法律允許的最大限度內。公司並不保證,明示或暗示,任何形式的,關於這個網站(包括其內容,硬件、軟件和鏈接),包括健身為特定目的,適銷性、標題、非侵權,結果,準確性,完整性、可訪問性、兼容性、安全性和自由從計算機病毒。公司將不承擔任何損害或損失,包括直接、間接、間接的、特殊的、附帶的或懲罰性損害賠償和/或利潤損失、與互聯網的使用,本網站,其內容或鏈接
進一步的,公司將不容易你任何失敗或延遲由公司提供的數據或任何義務這些條款和條件,這樣的失敗或延遲任何情況下的直接或間接結果超出公司的合理控製(和公司的義務期間將暫停這種情況下)。 - 5。第三方的政策
- 您可能被要求單獨同意第三方的政策如果你使用第三方軟件來創建或瀏覽數據或使用第三方的CAD數據。在這種情況下,公司不承擔任何責任等缺陷的CAD數據或第三方的軟件或違反了他們的權利。理解他們之前使用。
CAD下載(單元組裝)
CAD下載:文件格式
CAD數據的局限性
- 彙編的數據顯示了在概念設計階段裝配圖。數據的唯一目的是解釋的結構和功能組裝和不考慮也不作為最終設計。
您需要編輯數據,滿足您特定的設計條件。 - 單元組裝數據包括一些半成品。
這是配置,這樣每個分部裝配單元可以用作或編輯。 - 成品零件的數據是基於便於編輯草圖和曆史的尺寸和形狀。
- 數據包括可以跳轉到第三方組件是由該公司。
*部分的框架是一個分部裝配單元。
-
你訪問的CAD數據三角集團公司(以下簡稱公司)的帖子在這個網站(包括3 d CAD數據,中間3 d CAD數據和二維CAD數據;以下簡稱數據)是由公司生產和/或銷售的產品(以下簡稱產品)假設您已經閱讀並接受這些條款和條件支配你的數據的使用。如果您不同意這些條款和條件,你必須停止使用本網站和數據。你不能使用任何非法目的的數據或以任何方式與這些條款和條件不一致。





- *單元組裝數據包括一些半成品。
這是配置,這樣每個分部裝配單元可以用作或編輯。
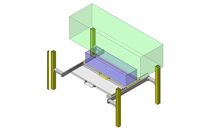
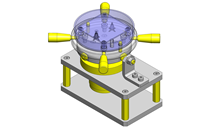
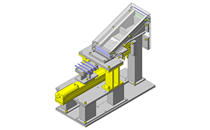
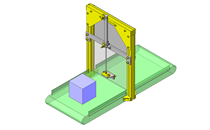
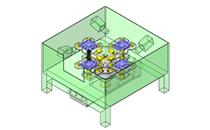
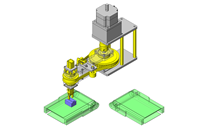
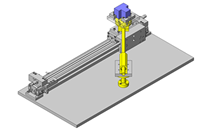
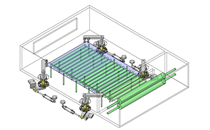
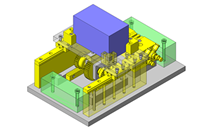
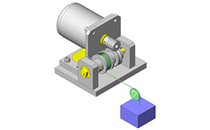
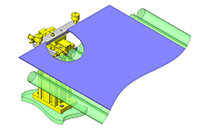
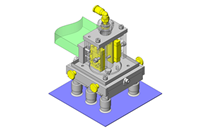
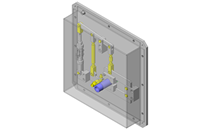
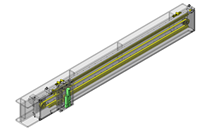
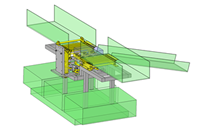
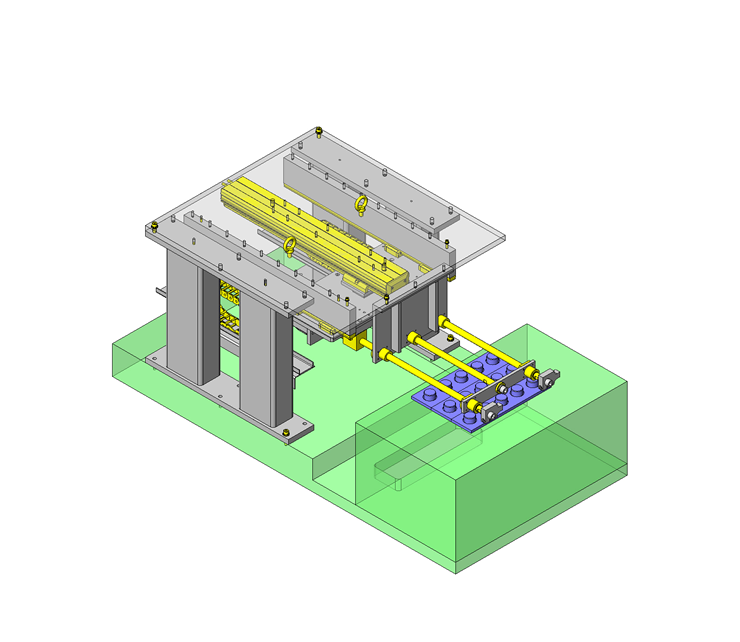
應用程序概述
目的
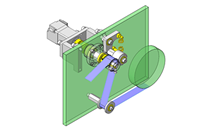
- 機製用來把雜誌從一個盒子裏,並將其轉換到切割操作。
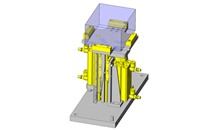
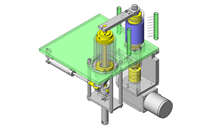
- 該雜誌盒有限訪問。將手指插入雜誌和盒子之間的水平位置。一旦就位,手指旋轉到垂直位置,這樣他們就可以使雜誌。
- 隻有一層的雜誌中拿出一個周期。
點使用
- 盒子用於運輸雜誌隻是開放的一麵。
目標工件
- 一小部分雜誌
- 外形尺寸:D W 280 x 70 x H 23毫米
- 容量:0.22公斤(包括運輸部分:0.33公斤)
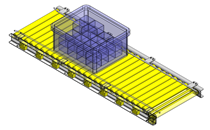
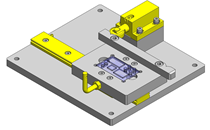
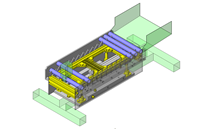
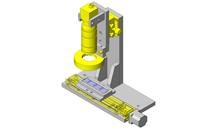
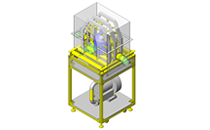
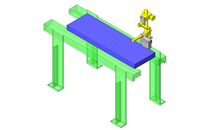
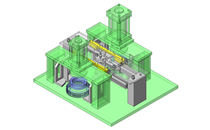
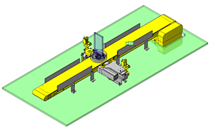
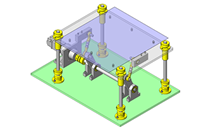
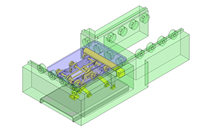
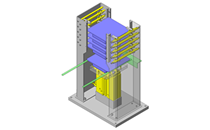
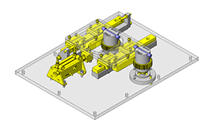
設計規範
操作條件和設計要求
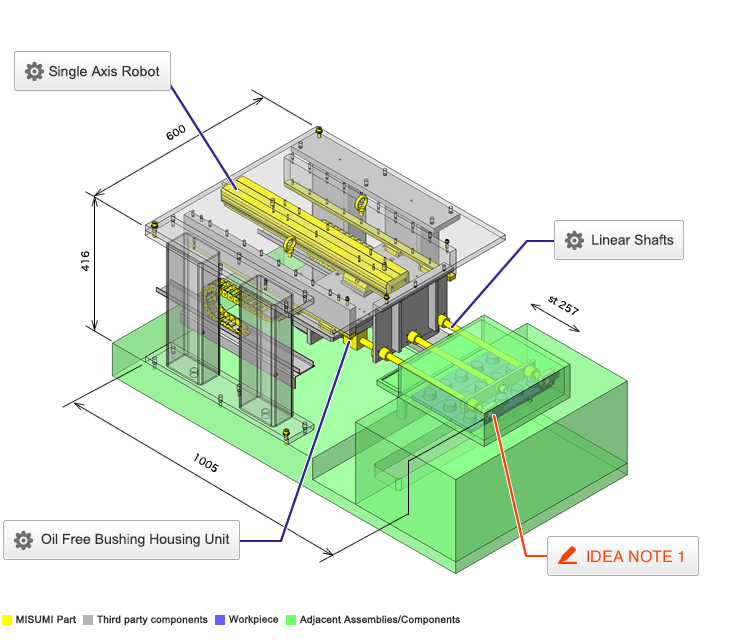
- 外形尺寸:W H D 600 x 1005 x 416毫米
- 拉拔力中風:257毫米
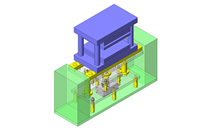
所需的性能
- 活動對象重量:12公斤
工件重量:0.33 * 3 = 0.99公斤
12 + 0.99 = 12.99公斤
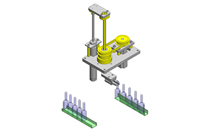
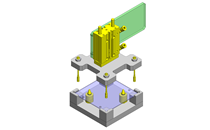
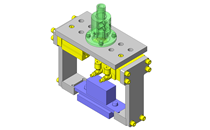
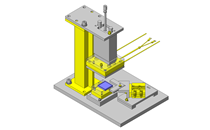
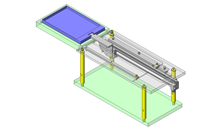
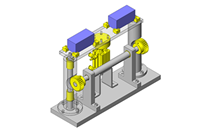
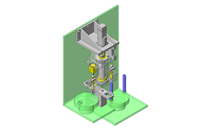
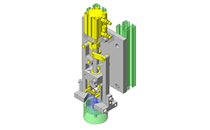
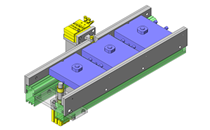
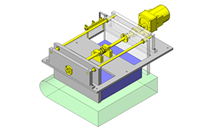
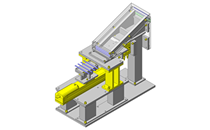
主要部件的選擇標準
- 單軸機器人
- 選擇一個推力為127.3 N(12.99千克)或更多。
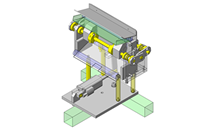
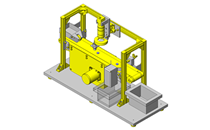
設計評價
驗證的主要組件
- 驗證機器人推力超過所需的推力。
- 單軸機器人
- 推力:283 N(目錄值)
- 所需的推力:12.99(工件能力)×9.8 = 127.3 N < 283 N
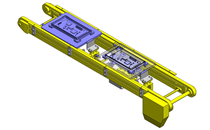
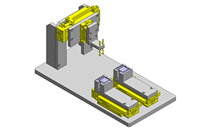
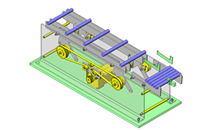
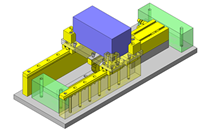
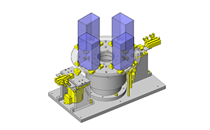
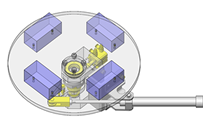
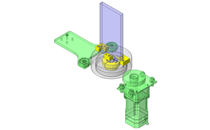
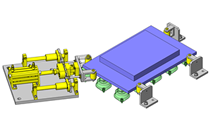
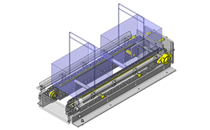
其他設計考慮
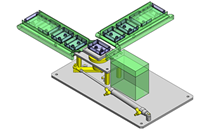
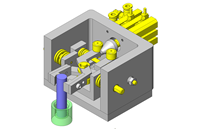
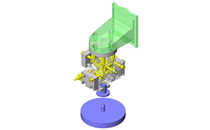
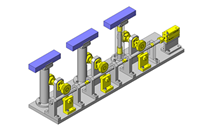
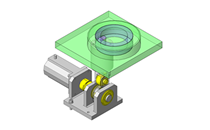
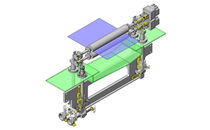
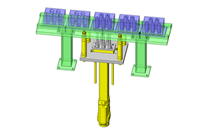
- 減少武器進入盒子的重量,使用空心軸。
- 三個武器使用的機製,消除了雜誌。一個是固定的和兩個可調。
探索類似的應用實例
頁麵- - - - - -/- - - - - -