- Webcode搜索|係列
-
#代碼
- 關鍵字建議
菜單關閉
三角步進馬達
| 天的船 |
|
|---|
-
現在配置
船隻一旦 報價 -
現在配置
船隻一旦 報價 庫存物品包括
-
現在配置
船隻一旦 報價 庫存物品包括
-
現在配置
船隻一旦 報價 -
現在配置
船隻一旦 報價 -

三角
STR係列步進驅動器緊湊,功能強大,數字驅動器可用於操作步驟&方向與交流或直流供電電壓。驅動直流電源非常適合小型汽車(NEMA大小11、14、17、23),當驅動物理空間是有限的,當使用多個驅動器在一個常見的電源。AC動力驅動更大的汽車是最好的(NEMA大小23、24和34)當maximimum力量是必需的。
現在配置
船隻一旦 報價 庫存物品包括
-
_Image.GIF?$product_view_b$)
三角
緊湊的ST10步進驅動器是一個家庭數字步進驅動器與多個控製選項和許多複雜的功能。三角提供以下模式:。
(ST10-IP)以太網/ IP通信網絡,與全問編程能力和可選的編碼器反饋。
(ST10-Si)獨立的Si編程和可選的編碼器反饋。
(ST10-Q)獨立的問編程與更多的I / O和選擇編碼器反饋,rs - 485,以太網UDP和TCP通信。
(ST10-Plus)獨立的問編程有限的I / O。現在配置
船隻一旦 報價 -
三角
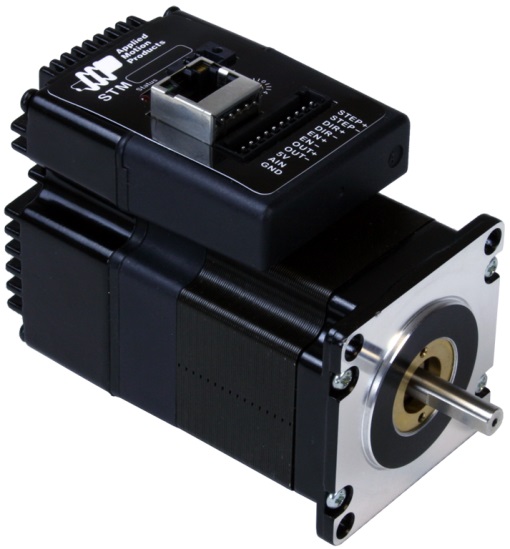
STM23IP集成步進驅動器+運動單位,融合NEMA 23步進電機和先進的5.0 /階段(peak-of-sine)步進驅動到一個單一的設備。電力驅動,位於後方的電機,必須由外部直流供電。STM23IP集成步進了以太網/ IP網絡通信,廣泛使用的工業製造業自動化應用程序的協議。與以太網/ IP用戶可以控製、配置和查詢驅動器使用一個開放的、基於標準的、工業以太網連接速度100兆比特/秒。所有STM23IP單位作為STM23Q單元運行相同的控製模式,加上所有驅動器+電動機特性可以通過以太網/ IP訪問,其中包括130多100命令和寄存器控製運動,I / O,配置輪詢,數學,注冊操作,和Q編程。所有STM23IP模型是CE批準和通過無鉛認證。
現在配置
船隻一旦 報價 -

三角
STM23Q集成步進驅動器+運動單位,融合NEMA 23步進電機和先進的5.0 /階段(peak-of-sine)步進驅動到一個單一的設備。電力驅動,位於後方的電機,必須由外部直流供電。STM23Q集成步進同樣可以在所有的操作控製方式- S選項,加上運行Q程序存儲在非易失性內存的能力。STM23Q附帶一個rs - 485端口編程和串行通信。
現在配置
船隻一旦 報價 庫存物品包括
-

三角
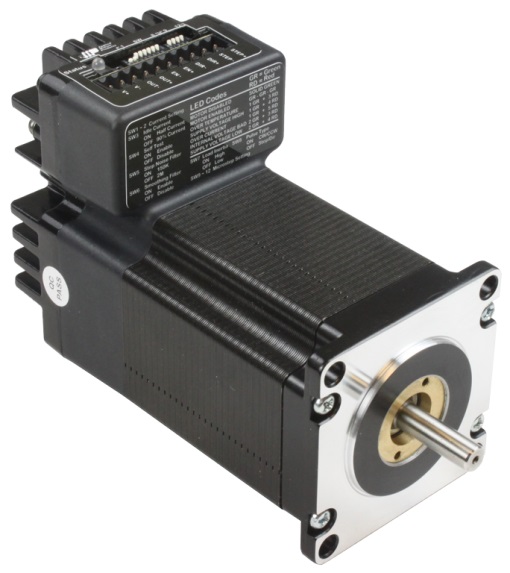
STF06步進驅動器是一個DC-powered微步驅動控製階段,雙極步電機。它提供了先進的電子電流控製和一個並聯諧振算法抑製電機和係統共振來提高電機平滑和可用的扭矩在寬速度範圍。驅動器采用電子轉矩波動平滑和微步仿真大大降低電機噪聲和振動。驅動器必須從12 - 48 v直流供電,輸出6.0 /階段(peak-of-sine)步進電機。過壓,過熱,過流保護功能防止損傷而在不利條件下運行。所有31驅動器是CE批準和通過無鉛認證。
現在配置
船隻一旦 報價 -
三角
STM17集成驅動+電機步進電機和驅動組件熔合成一個單一的設備。這些集成步進提供一種節省空間的設計,減少了布線,節省成本在單獨的電動機和傳動組件。三角提供以下模型:。
(STM17C)Canopen協議DS301 DSP4032,概要文件的位置,速度,和導航模式。
(STM17R)脈衝和方向,CW / CCW脈衝。
(STM17Q)執行存儲問項目,與rs - 485網絡或以太網選項,條件處理和多任務,數學函數,注冊操作,編碼器後,第三方HMI兼容性。現在配置
船隻一旦 同樣的一天 庫存物品包括
-
現在配置
船隻一旦 報價 -

三角
STM綜合步進驅動器+電機單元,步進電機和驅動組件融合成一個單一的設備。這節省空間的設計消除了布線,節省成本與傳統電動機和驅動解決方案。STM24集成步進結合高扭矩NEMA和精密的步進電機驅動器/ 24步進電機控製器。電力驅動,位於後方的電機,必須由外部直流供電。
現在配置
船隻一旦 報價 -

三角
STAC5 & STAC 6係列步進驅動器是強大的、兩階段,為高速、高扭矩雙相步進電機驅動器的應用程序。它使用複雜的電流控製為最優平滑在寬速度範圍。並聯諧振,轉矩波動平滑和微步共同努力,使步進電機的性能提升到一個新的高。。
(控製模式:)如果編程,流命令,模擬定位、編碼器後,問編程,以太網/ IP。
(輸出電流)0.5 - -6.0 /階段
(通信端口)rs - 232、rs - 485和EthernetEtherNet / IP現在配置
船隻一旦 報價 -
結合步進電機- STM23係列&方向或CW /公約脈衝控製步
三角
STM23R集成步進驅動器+運動單位,融合NEMA 23步進電機和先進的5.0 /階段(peak-of-sine)步進驅動到一個單一的設備。電力驅動,位於後方的電機,必須由外部直流供電。STM23R設計步驟和方向控製從外部控製器。外部控製器可以是運動控製器、PLC、或其他設備提供了兩種數字輸出:一個輸出為數字脈衝來控製電機的位置和速度,和第二個輸出來控製汽車的方向,連續波和公約。一些控製器提供兩個脈衝輸出,稱為CW /公約脈衝或pulse-pulse -而不是脈衝和方向。STM23R使用這些控製器僅僅通過改變一個指撥開關設置。所有STM23R集成步進通過無鉛認證。
現在配置
船隻一旦 報價 -
現在配置
船隻一旦 報價 -
現在配置
船隻一旦 報價 -
三角
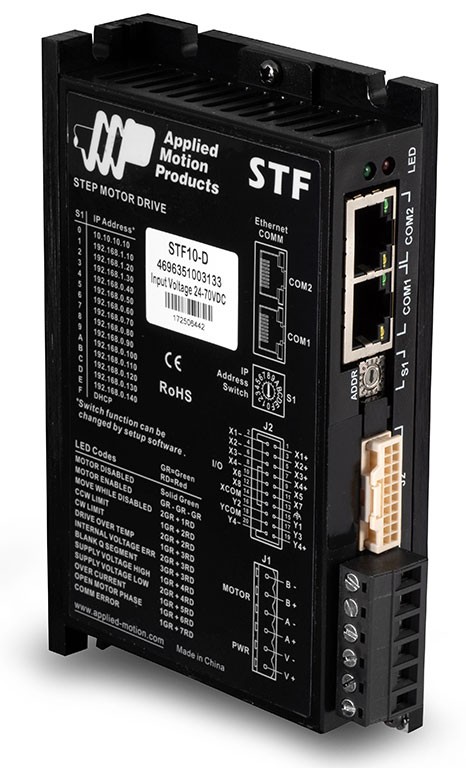
STF10步進驅動器是一個DC-powered微步驅動控製階段,雙極步電機。它提供了先進的電子電流控製和一個並聯諧振算法抑製電機和係統共振來提高電機平滑和可用的扭矩在寬速度範圍。驅動器采用電子轉矩波動平滑和微步仿真大大降低電機噪聲和振動。驅動裝置必須從24到70 VDC,可以輸出到10.0 /階段(peak-of-sine)步進電機。過壓,過熱,過流保護功能防止損傷而在不利條件下運行。所有31驅動器是CE批準和通過無鉛認證。
現在配置
船隻一旦 報價 -
三角
STM23C集成步進驅動器+運動單位,融合NEMA 23步進電機和先進的5.0 /階段(peak-of-sine)步進驅動到一個單一的設備。電力驅動,位於後方的電機,必須由外部直流供電。STM23C集成步進操作設計在CANopen通信網絡和符合自動化(CiA) DS301 DSP402規範。STM23C附帶一個rs - 232端口為網絡通信編程和CANopen端口。
現在配置
船隻一旦 報價 -

三角
24 - 80 DC-powered微步進驅動控製兩相雙極電機步。驅動器匹配組NEMA 23和NEMA 34幀。(控製模型)脈衝和方向,速度,流命令,SiNet中心操作,Q程序存儲在非易失性內存。
現在配置
船隻一旦 報價






_Image.GIF?$product_view_b$)













| 品牌 |
|---|
| 產品係列 |
| 天的船 |
| 類型 |
| 方形法蘭尺寸(毫米) |
| 電力供應 |
| 電壓規格 |
| 控製方法 |
| 步驟角(°) |
| 保持轉矩(分類)(N⋅m) |
| 減速齒輪 |
| 驅動方式 |
| 反對(°) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 品牌 | 三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
三角 |
| 產品係列 | ||||||||||||||||||||
| 天的船 | 報價 | 報價 庫存物品包括 |
報價 庫存物品包括 |
報價 | 報價 | 報價 庫存物品包括 |
報價 | 報價 | 報價 庫存物品包括 |
報價 | 同樣的一天 庫存物品包括 |
報價 | 報價 | 報價 | 報價 | 報價 | 報價 | 報價 | 報價 | 報價 |
| 類型 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 方形法蘭尺寸(毫米) | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 電力供應 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 電壓規格 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 控製方法 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 步驟角(°) | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 保持轉矩(分類)(N⋅m) | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 減速齒輪 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 驅動方式 | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |
| 反對(°) | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - | - - - - - - |






_Image.GIF?$product_view_c$)













加載……
配置
過濾器
類型
- 驅動裝置
- 運動單位
- 集
公製/英製
廣場法蘭尺寸(毫米)
電力供應
- 單相
- 兩階段
- 五角大樓
- 單相/三相
電壓規格
- 直流規格
- AC100類型
- AC200類型
控製方法
- 開環
- 閉環
步角(°)
保持轉矩(分類)(N⋅m)
- 0.1或更少
- ~ 0.2
- ~ 0.3
- ~ 0.4
- ~ 0.5
- ~ 0.6
- ~ 0.8
- ~ 0.9
- ~ 1
- ~ 1.1
- ~ 1.2
- ~ 1.4
- ~ 1.5
- ~ 1.7
- ~ 1.8
- ~ 2
- ~ 3
- ~ 4
- ~ 5
- ~ 10
- ~ 15
- ~ 20
- ~ 40
0.1 * -0.2代表> /≤0.2。
減速齒輪
- 沒有
- 存在
驅動方式
強烈反對(°)
品牌
計算機輔助設計
-
- 二維
- 3 d
我們怎樣才能改善呢?
我們怎樣才能改善呢?
雖然我們不能直接回應評論提交這種形式,將成為未來的改進了的信息。
客戶隱私政策
謝謝你的合作。
雖然我們不能直接回應評論提交這種形式,將成為未來的改進了的信息。
請使用調查形式。
客戶隱私政策